

这里的GPS不是用来导航的GPS,其全称是Guided Policy Search,是一种局域的model-based RL算法,各种版本基本上都是Levine大神搞出来的。
这里有好多版本的,暂时这里只讲第三篇工作。
这里讲了一种model-based的算法,主要思路是先找一条state-action的路径,然后交替地1)优化路径,使得该路径既离现有的控制策略不远,又能够最小化cost;2)优化策略,使得策略离被优化过的路径更近。通过这样trajectory optimization + policy search的方式在bipedal push recovery和walking on uneven terrain问题上取得了较好的实验结果。
continuous state space、continuous action space、model-based with known model dynamics
1. 定义优化问题
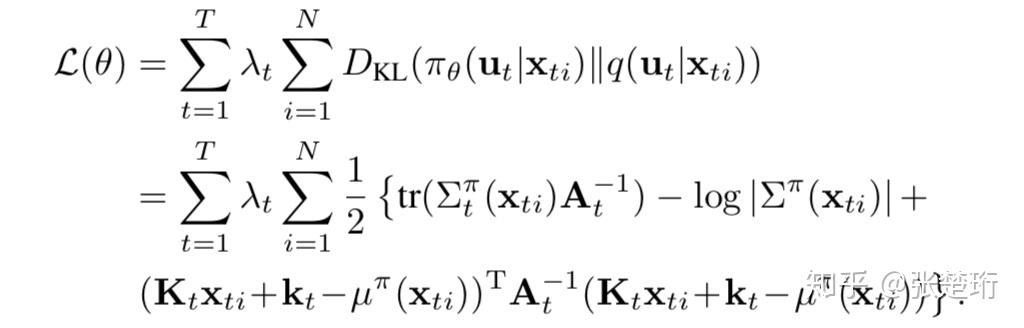
首先从一个类似SQL算法的优化目标开始
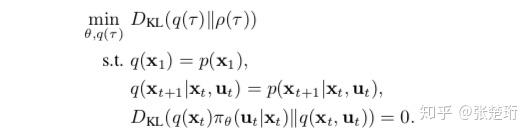
首先先明确一下轨迹 是状态
和控制
交替的一个序列。其中
是最优轨迹分布,注意到当cost幅值比较大的时候这个最优轨迹更趋近于确定性的轨迹。通过约束,轨迹分布
就是参数控制的策略
下形成的轨迹。之所以不直接对最优轨迹
优化策略,而是要经过中间的
,是由于在提供了环境模型的情况下,轨迹更容易被优化。
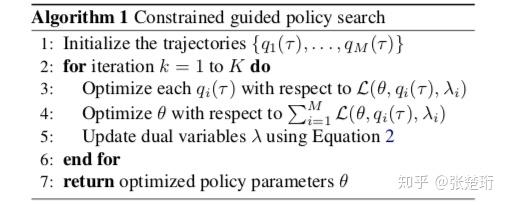
2. dual gradient descent求解
接下来使用dual gradient descent方法来求解上述优化问题,得到算法的大框架


关于dual gradient descent方法可以参考这篇帖子:Dual Gradient Descent
这个主算法里面的第3行是在固定 和
的情况下优化轨迹
,第4行是在固定
和
的情况下优化策略
,下面分别介绍如何进行这两步操作。
3. 轨迹优化
假定轨迹是根据线性策略
和线性化的动力学
得到的,其整个轨迹上都是高斯分布,令该轨迹分布的均值为
。说明:用
表示拼起来的向量;下标都表示求导;为了和文中一致下标
表示对
的求导;有 hat 上标的表示原来的轨迹,没有 hat 上标的表示相对于原来轨迹的扰动(即小量)。
轨迹是由哪些量描述的呢?我们这里说的轨迹是一个轨迹的概率分布,它是一个高斯型的分布,因此决定它的除了均值之外,还有
的协方差矩阵

其中 为定义,其他元素容易求出。
后面的过程比较复杂,我们先要明确一下要我们要干嘛。我们的目标是把问题化为LQG问题(动力学线性、损失函数二次型),然后利用类似iLQG的最优控制公式求解当前轨迹 附近的更好的新轨迹
。我们这里说的轨迹是由如下参数构成的
。
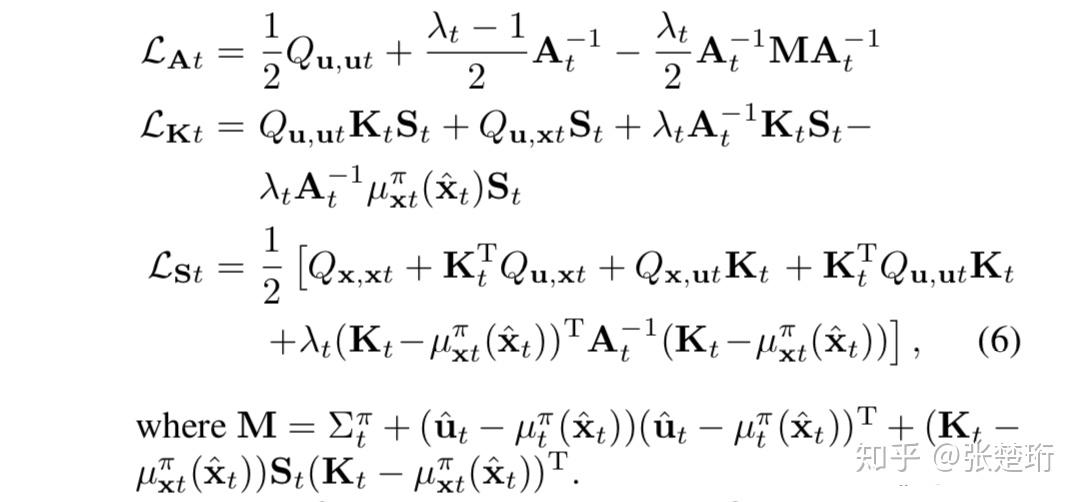
首先对轨迹进行优化的时候认为 和
是固定的,我们可以把损失函数写成只与轨迹有关的形式,通过一些计算之后能够得到(注意,这里省略了对于时间 t 的求和)
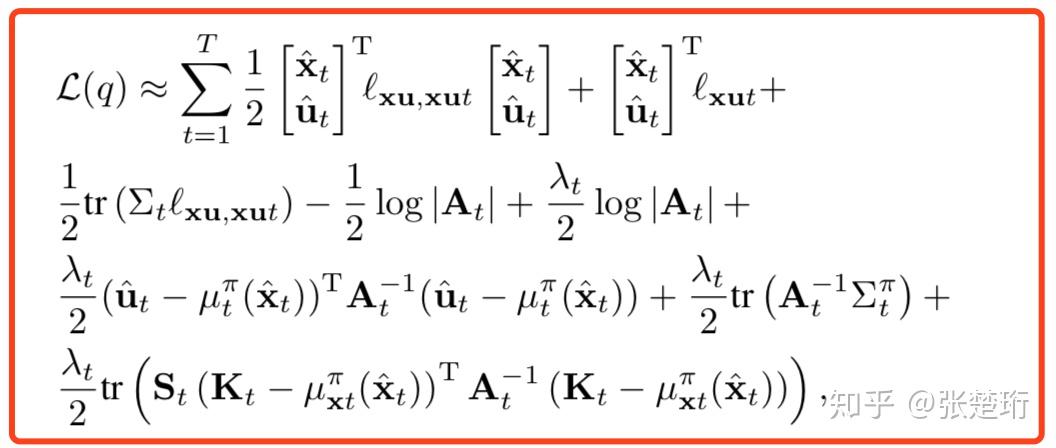
类比 iLQG 算法里面的损失函数 ,有最优控制
。我们的思路就是针对上面损失函数把相应的项找出来,其方法也很简单就是把上面的损失函数对控制
求导,可以得到

但是当你求的时候会发现,求出来的形式跟文章一样,但是你式子里面出现单状态损失函数 (这个说法不是规范的说法,为了方便叙述我自己编的)的时候,文章里面都写的是
。为什么这样呢?因为当你改变了某一处控制函数的时候,它后面相应的轨迹也都发生了改变,因此当某一处控制函数的改变导致了单状态损失函数的时候,应该连带上它对于后续轨迹上损失函数的改变,即用下面的
来替代即可

接下来,比对 iLQG 的算法公式能够得到新的最优控制扰动


注意到,其中 Q 的计算是包含损失函数在后一步上的导数的,因此该过程需要通过逆序的动态规划来求解。计算 Q 会用到的损失函数计算公式如下。

由此我们能够确定新的轨迹的均值 ,而该新轨迹的协方差矩阵
也需要被确定,观察上面关于协方差矩阵的定义,如果我们求出了
、
和
,就可以确定轨迹的协方差矩阵了。
知道新轨迹的均值之后怎么求出相应的 、
和
呢?自然想到的就是对损失函数相对于要求的这些量求导,并且令导数为零。同样,为了避免轨迹协方差变化对于后续轨迹产生的影响,我们需要把单状态损失函数替换为

求导可得
零导数为零,可得


由于 、
和
相互依赖,因此我们需要迭代多次直到它们数值收敛。
4. 策略优化
有了更优的轨迹之后,我们接下来把轨迹固定,来优化相应的策略,这一步的优化相对来讲就比较直接了:写出关于损失函数关于策略参数 的表示,然后使用梯度方法做优化即可,比如SGD或者LBFGS。

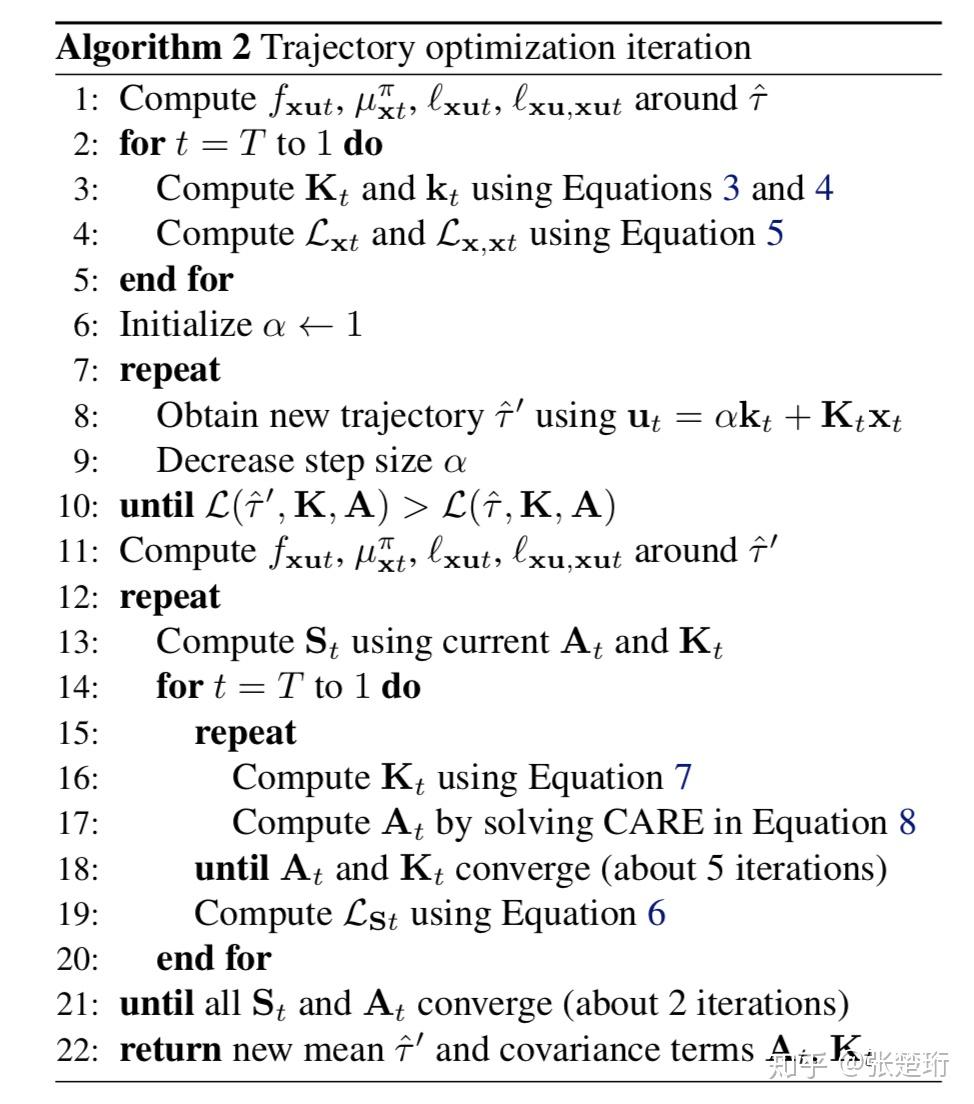
其中算法1是主要的算法,算法2是其中第3行的具体算法。其中值得说明的是,第7-10行在最优开环控制上面缩小,以找到确定能改善损失函数的开环控制,其原因是由于环境是非线性的,而我们在局域假设了线性,因此如果开环控制变化的太多会导致假设不成立,形成的损失函数甚至不降反升。另外,第10行的大于符号应该是写错了,应该是小于符号,这里希望做的是最小化损失函数。
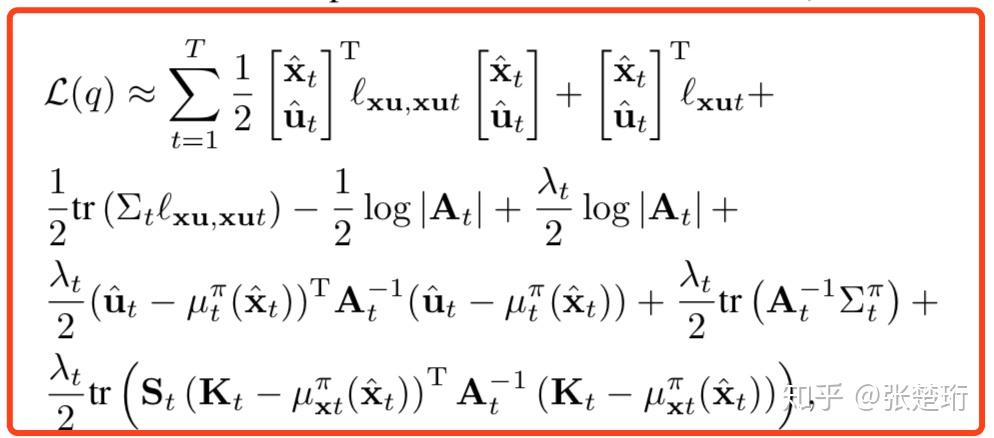
从绿框公式到红框公式的推导?
注意每一步的熵函数其实并不独立,后面的会依赖前面的,所以上面这样写其实不规范,不过我们在运算的过程中记住这一点就好了,同时,高斯分布的熵函数为

有
其中随后一步是因为,求导的损失函数是要对于轨迹参数求导的,无关的常数项就可以不写了,有

注意到 ,有
其中最后一个等号的成立可以参看这个课件的第六页。
同时注意到高斯函数的交叉熵

有
其中约等于符号是因为前一项是完全关于策略的,与我们这里要优化的轨迹无关,因此不理会这一项,其中比较复杂的最后一项细写下来是
其中轨迹的控制和策略的控制都有直流项的,但是由于后面求协方差并不影响,为了简便,这里就不写直流项了。
最后拼起来有
推导过程参考了 【强化学习大讲坛】强化学习进阶 第九讲 引导策略搜索。

